

 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

жїгЊABBЃЈABBЃЉЁЂПтПЈKUKAЁЂАВДЈYASKAWAЁЂЗЂФЧПЦFANUCЃЈfanucЃЉЁЂХЗЕиЯЃOTCЁЂДЈЦщKawasakiЁЂхлВЉAUBOЁЂДѓзхЁЂЯжДњHYUNDAIЁЂЕчзАDENSOЁЂХЗФЗСњOMRONЁЂАЎЦеЩњЁЂEPSONЕШЛњЦїШЫЯюФПМЏГЩЁЂЛњЦїШЫжмБпЃКЛњЦїШЫЙмЯпАќЃЌЛњЦїШЫЕМЙьЃЌЛњЦїШЫМазІЁЂЛњЦїШЫЪлКѓЮЌБЃЁЂЛњЦїШЫХрбЕвЛеОЪНЗўЮёЁЃ
ЕижЗЃКЩЯКЃЪаМЮЖЈЧјФЯЯшеђжкШЪТЗ399КХBзљ20ТЅ(19921272665)
ЗЂФЧПЦГЃгУаЭКХШчЯТЃК
ОЋУмЁЂаЁаЭЛњЦїШЫЃКLR MATE 200iDЯЕСаЁЂM-10iAЃЈРЯаЭКХЃЉЁЂM-20iAЃЈРЯаЭКХЃЉЁЂM-10iDЁЂM-20iD
жааЭЛњЦїШЫЃКM-410iCЯЕСаЁЂM-710iCЯЕСа
ДѓаЭЛњЦїШЫЃКR-2000iC/165FЁЂR-2000iC/210F
ЮвУЧЪЧвЛМвжЧФмжЦдьвЛеОЪНзлКЯ ЗўЮёЩЬ,зЈзЂгкЛњЦїШЫЁЂжЧФмзАБИЁЂздЖЏЛЏЩшБИвдМАжмБпКЫаФХфЬзВПМўЕШВњЦЗМЏПЦбаЁЂЩшМЦЁЂгЊЯњЁЂММЪѕЗўЮёЁЂВњвЕЛЅСЊЭјЁЂНјГіПкУГвзгквЛЬхЕФДѓаЭЕФПЦММЙЋЫОЁЃ
вЛЁЂДІРэЖдЯѓЃКLR MateЯЕСаЛњЦїШЫ
ИУЯЕСаЛњЦїШЫгаШ§ИљЦЄДјЃЈJ3жсЃЌJ5жсЃЌJ6жсЃЉЃЌЦЄДјЫцзХЪЙгУПЩФмЛсГіЯжФЅЫ№ЫЩЖЏЃЌЫљвдБЃбјЪБашвЊЖдИУаЭКХЛњЦїШЫЕФЦЄДјНјааеХСІМьВщЁЃ

ОпЬхВйзїЗНЗЈШчЯТЃК
ЖўЁЂЪЙгУЙЄОпЧхЕЅ
|

|
1.ФкСљНЧАтЪжвЛЬз |
|

|
2.еХСІМЦвЛИіЃЈаЭКХЃКA97L-0218-0700ЃЉ |
Ш§ЁЂМьВщВПЮЛКЭЖдгІВЮЪ§
3.1 LR Mate 200ICМьВщВПЮЛКЭЖдгІВЮЪ§ЃЈвдЯТЭМЦЌПЩЕуЛїЗХДѓЃЉ
|

|


J3жсЦЄДјеХСІМьВщМАЕїећ |
|

|


J5жсЦЄДјеХСІМьВщМАЕїећ |
|

|


J6жсЦЄДјеХСІМьВщМАЕїећ |
3.2 LR MATE 200IDМьВщВПЮЛКЭЖдгІВЮЪ§
|

|


J3жсЦЄДјеХСІМьВщМАЕїећ |
|
|


J5жсЦЄДјеХСІМьВщМАЕїећ |
|
|


J6жсЦЄДјеХСІМьВщМАЕїећ |
ЫФЁЂОпЬхМьВщВНжш
ЯТУцвдLR Mate 200IDЛњЦїШЫЕФJ5жсЦЄДјЮЊР§ЁЃ
|

|
1.ДђПЊJ5жсИЧАхЁЃ |
|

|
2. НЋеХСІМЦПЊЛњЁЃЦфжагаСНЕЕПЊЙиЃЌON(Ип)ПЊЙиЪЪгУгкдывєаЁЃЌеёЖЏаЁЕФГЁКЯЃЛONЃЈЕЭЃЉПЊЙиЪЪгУгкгыдывєДѓЃЌеёЖЏДѓЕФГЁКЯЁЃ


|
|

|
3. ПЊЛњКѓЃЌАДОіЖЈМќЃЌНјЕНШчЭМЫљЪОЕФЛУцЃЌЪфШыЦЄДјЕФЕЅЮЛжЪСПЃЌетРяЪфШы0.0208КѓАДОіЖЈМќЃЌЦфЫћжсКЭЦфЫћЛњаЭЕФВЮЪ§ЯъНЋЕкШ§еТЁЃ

|
|

|
4. ЦЄДјЕФжжРр LR MATEЯЕСаЕФЫљгаЛњаЭЖМЪЧбЁдё1ЃЈTGРраЭЃЉЁЃ

|
|

|
5.ЦЄДјЕФПэЖШ етРябЁдё4mmЃЌАДОіЖЈМќЁЃЦфЫћжсКЭЦфЫћЛњаЭЕФВЮЪ§ЯъНЋЕкШ§еТЁЃ

|
|

|
6.ЦЄДјЕФПчЖШ етРябЁдё187mmЃЌАДОіЖЈМќЁЃЦфЫћжсКЭЦфЫћЛњаЭЕФВЮЪ§ЯъНЋЕкШ§еТЁЃ

|
|

|
7.ВтСПЛУц ГіЯжетИіЛУцЃЌЫЕУїВЮЪ§вбОЩшжУКУЃЌПЩвдНјааЯТУцЕФЦЄДјеХСІВтСПЁЃ

|
|

|
8.ВтСПеХСІ гУФкСљНЧдкЦЄДјжаВПЧсЧсЧУЛїЃЌНЋеХСІМЦЕФеёЖЏНгЪеЦїППНќЦЄДјЃЌжБЕНГіЯжЖСЪ§ЃЌМьВщЖСЪ§ЪЧЗёдкдЪаэЗЖЮЇФкЁЃШчЙћВЛдкЗЖЮЇФкЃЌОЭашвЊАДееЕкШ§еТЕФЗНЗЈЃЈЕїећТэДяЙЬЖЈТнЫПЃЉЕїећЦЄДјЕФЫЩНєЃЌШЛКѓдйВтСПЦЄДјеХСІЃЌжБЕНЦЄДјеХСІдйдЪаэЗЖЮЇФкЁЃ

|
вдЩЯЪЧЦЄДјМьВщЕФШЋВПЙ§ГЬЃЌЭъГЩКѓЖдЯжГЁзіКУ5SЙЄзїЁЃ
ЮхЁЂеХСІМЦВтЖЈЬѕМўЕФБЃДцКЭЖСГі
УПвЛЬЈЛњЦїШЫгаШ§ИљЦЄДјвЊВтСПЃЌашвЊШ§зщЬѕМўЁЃвЛИівЛИіЪфШыЛсБШНЯЗБЫіЃЌетРяЪЙгУеХСІМЦЕФВтЖЈЬѕМўЕФБЃДцЙІФмЃЈ***Жр10зщЬѕМўЃЌNO:1-10ЃЉЁЃ
|

|
1.АДееЕкЫФеТЕФЗНЗЈЪфШыВЮЪ§ЃЌжБЕНГіЯжШчЭМЫљЪОЕФВтСПЛУцЁЃ

|
|

|
2.БЃДцЬѕМўЙІФм ШчзѓЭМЫљЪОЃЌАДгвЩЯНЧЕФАДМќЃЌдйАДЕЧТММќЃЌГіЯжгвЭМЕФЛУцЃЌАДЪ§зжАДМќ2ЃЌдйАДОіЖЈМќЃЌНЋЩЯЪіВЮЪ§ДцЮЊЬѕМў2ЁЃ

|
|

|
3.ЖСГіЬѕМўЙІФм НЋеХСІМЦЙиЛњКѓдйжиЦєЃЌАДЖСГіМќЃЌАДШы2КХЬѕМўЃЌОЭПЩвдПДЕН2КХЬѕМўЕФОпЬхЩшжУЁЃ

|
|

|
4. ВтСП ПЊЛњКѓЃЌжБНгЪфШыЬѕМўКХ2КѓАДОіЖЈМќЃЌОЭПЩвдгУжЎЧАБЃДцКУЕФЬѕМў2ШЅВтСПЦЄДјЕФеХСІЁЃ

|
СљЁЂзївЕжаАВШЋгУЦЗвЛРР
АВШЋУБЁЂАВШЋЙвЫјЁЂЪжЬзЁЂАВШЋаЌ
POSITIONЦСФЛвдЙиНкНЧЖШЛђжБНЧзјБъЯЕЯдЪОЮЛжУаХЯЂЁЃЫцзХЛњЦїШЫЕФдЫЖЏЃЌЦСФЛЩЯЕФЮЛжУаХЯЂВЛЖЯЕиЖЏЬЌИќаТЁЃЦСФЛЩЯЕФЮЛжУаХЯЂжЛЪЧгУРДЯдЪОЕФЃЌВЛФмаоИФЁЃ
зЂвт:
ШчЙћЯЕЭГжаАВзАСЫРЉеЙжсЃЌE1ЃЌE2ЃЌвдМАE3БэЪОРЉеЙжсЮЛжУаХЯЂЁЃ
ЯдЪОЮЛжУзДЬЌ:
ВНжш:
АДЯТ[POSN ]МќЁЃ
бЁдёЪЪЕБЕФзјБъЯЕ:
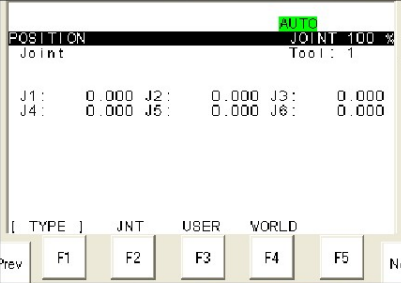
АДF2[JNT]ЃЌНЋПДЕНШчЯТЕФРрЫЦЦСФЛ:
Tool:БэЪОЕБЧАЪЙгУЕФЙЄОпзјБъКХ;
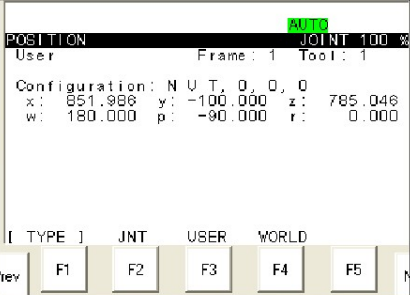
АДF3[USER]ЃЌНЋПДЕНШч"ЯТЕФРрЫЦЦСФЛ:
Tool:БэЪОЕБЧАЪЙгУЕФЙЄОпзјБъКХ;
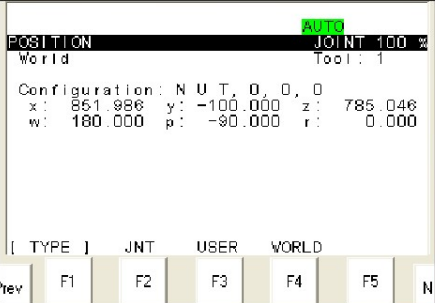
АДF4[WORLD]НЋПДЕНШчЯТЕФРрЫЦЦСФЛ:
вдЩЯФкШнРДдДгкЃКЭјТч
ЧжШЈЩО
ИќЖрЛњЦїШЫзЪбЖЧызЩбЏЃКЗЂФЧПЦЛњЦїШЫ
ЁЁЁЁИќЖрзЩбЏЃКЗЂФЧПЦЛњЦїШЫ

