

 联系我们
联系我们

主营ABB(ABB)、库卡KUKA、安川YASKAWA、发那科FANUC(fanuc)、欧地希OTC、川崎Kawasaki、遨博AUBO、大族、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生、EPSON等机器人项目集成、机器人周边:机器人管线包,机器人导轨,机器人夹爪、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
发那科常用型号如下:
精密、小型机器人:LR MATE 200iD系列、M-10iA(老型号)、M-20iA(老型号)、M-10iD、M-20iD
中型机器人:M-410iC系列、M-710iC系列
大型机器人:R-2000iC/165F、R-2000iC/210F
我们是一家智能制造一站式综合 服务商,专注于机器人、智能装备、自动化设备以及周边核心配套部件等产品集科研、设计、营销、技术服务、产业互联网、进出口贸易于一体的大型的科技公司。
调校是使机器人各轴的轴角度与连接在各轴电机上的值脉冲编码器的脉冲计数值对应起来的操作。具体来说,调校是求取零位中的脉冲计数值的操作。
机器人的当前位置,通过各轴的脉冲编码器的脉冲计数值来确定。
工厂出货时,已经对机器人进行调校,所以在日常操作中并不需要进行调校。但是,下列情况下,则需要进行调校。
· 更换电机
· 更换脉冲编码器
· 更换减速机
· 更换电缆
· 机构部的脉冲计数后备用电池用尽
调校的种类:
1.夹具位置调校:这是使用调校夹具进行的调校。这是在工厂出货之前进行的调校
2.零位调校(对合标记 调校) :这是在所有轴都处在零度位置进行的调校。机器人的各轴,都赋予零位标记(对合标记)。在使该标记对合于所有轴的位置进行调校。
3.简易调校:这是在用户设定的任意位置进行的调校。脉冲计数值,根据连接在电机上的脉冲计编码器的转速和每转之内的转角计算。利用每转之内的转角值不会丢失而进行简易调校。
4.1轴调校:这是对每一轴进行的调校。各轴的调校位置,可以在用户设定的任意位置进行。此方法在仅对某一特定轴进行调校时有效。
5.输入调校数据:这是直接输入调校数据的方法。
注意
1 若错误进行调校,会导致机器人意想不到的操作,十分危险。因此,位置调整画面只有在系统变量
$MASTER_ENB=1 或者 2 时才予以显示。在进行位置调整操作后,应按下位置调整画面上显示的 F5“DONE”
(结束)。由此自动设定为$MASTER_ENB=0,位置调整画面不再显示。
2 在进行调校之前,建议用户事先备份当前的调校数据。
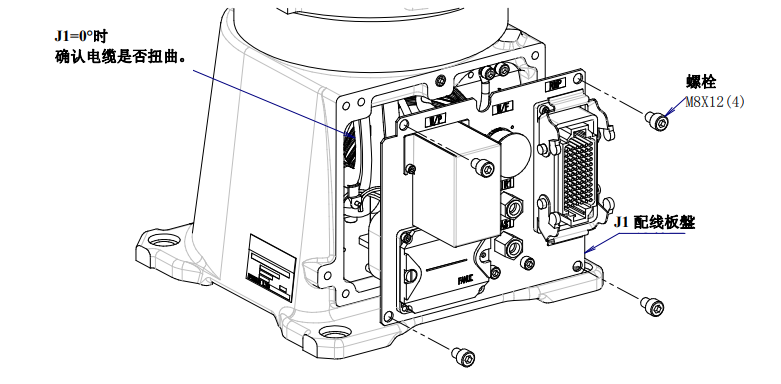
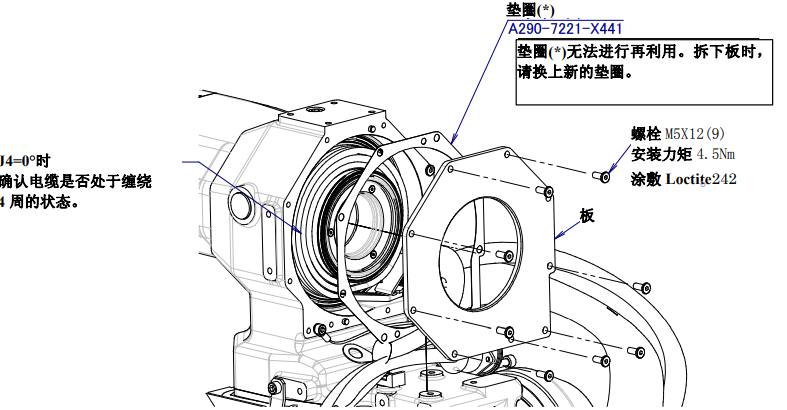
3 可动范围在机构上有 360o以上,且在电缆所连接的轴(J1 轴,J4 轴)上,从正确的调校位置使轴旋转一周进行对
合时,机构部内电缆会发生损伤。调校时大幅度移动轴而弄不清正确的旋转位置时,请拆下配线板或者盖板,
确认内部电缆的状态,之后再进行正确的位置进行调校。
以上内容来源于:网络
侵权删
更多机器人资讯请咨询:发那科机器人

更多咨询:发那科机器人

