

 联系我们
联系我们

工博士机器人技术有限公司作为智能工厂服务商,从智能制造解决方案的提供,到工业电气产品的一站式采购,从智能制造培训到专业维护保养,围绕设备的智能升级改造、生产加工、设备保障、技能培训等多个方面,实现生产的智能、高效、环保和安全。 公司具备研发、工艺、单元产品、成套装备、自动化生产线、售后服务、质量控制等在内的自主核心技术,已形成工业机器人系统解决方案的完整产业价值链
主营ABB(ABB)、库卡KUKA、安川YASKAWA、发那科FANUC(fanuc)、欧地希OTC、川崎Kawasaki、遨博AUBO、大族、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生、EPSON等机器人项目集成、机器人周边:机器人管线包,机器人导轨,机器人夹爪、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
主营ABB(ABB)、库卡KUKA、安川YASKAWA、发那科FANUC(fanuc)、欧地希OTC、川崎Kawasaki、遨博AUBO、大族、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生、EPSON等机器人项目集成、机器人周边:机器人管线包,机器人导轨,机器人夹爪、机器人售后维保、机器人培训一站式服务。
地址:上海市嘉定区南翔镇众仁路399号B座20楼(19921272665)
--------------------------------------------------------------------------------------------------
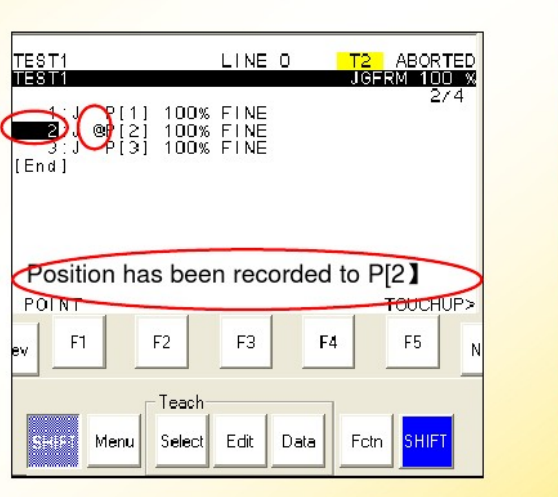
方法一:
示教修改位置点
步骤:
a)进入程序编辑界面;
b)移动光标到要修正的运动指令的行号处;
c)示教机器人到需要的点处;
d)按下[SHIFT]键再按F5[TOUCHUP] (点修正) 键,当该行出现@符号,同时屏幕下方出现:
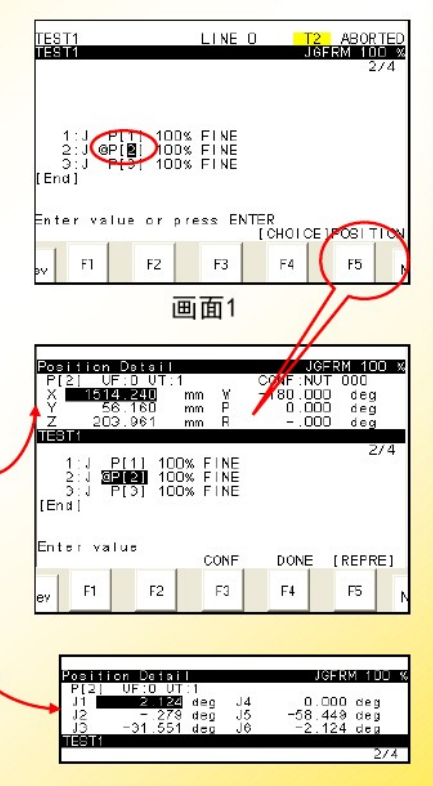
方法二:
直接写入数据修改位置点
步骤:
a)进入编辑界面(画面1);
b)移动光标到要修正的位置号处;
c)按下F5 [ POSITION] (位置)显示位置数据子菜单;
d)按F5 [REPRE] (形式) 切换位置数据类型

e)输入需要的新值;
f)修改完毕,按[F4 DONE] (完成)退回界面。
以上内容来源于:网络
侵权删
更多机器人资讯请咨询:发那科机器人

更多咨询:发那科机器人

